
计算机组成 P4 - Verilog Single Cycle CPU
Supported instruction set
add, sub, ori, lw, sw, beq, lui, jal, jr, nop
Data Path
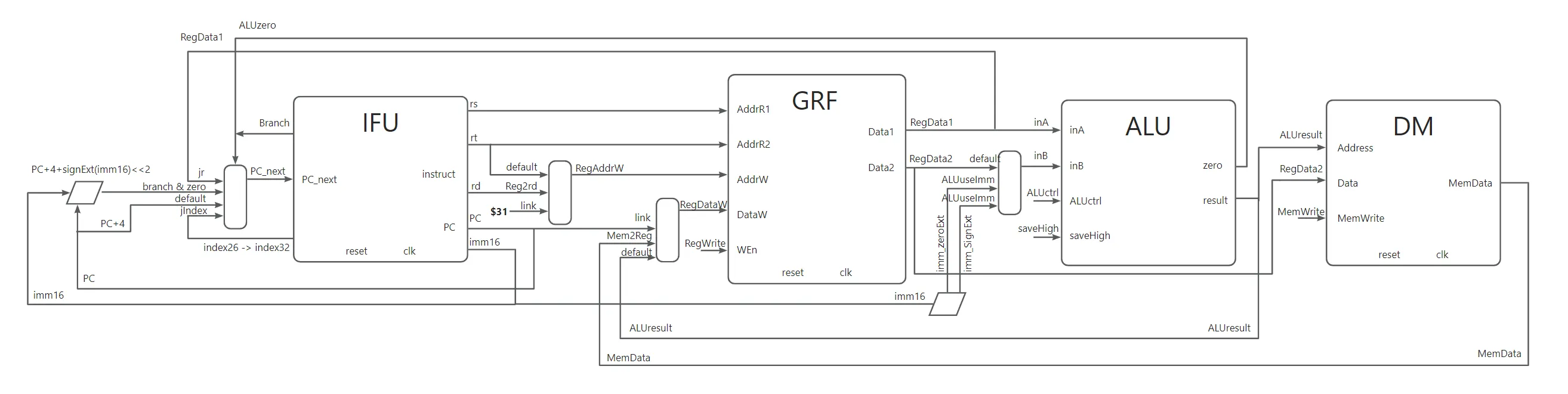
PC_next
Branch & ALUzero:
PC_next <- PC + 4 + signExt(imm16) << 2
Jump to index: # jIndex
PC_next <- {PC[31:28], index26, 2'b00}
Jump to register: # jr
PC_next <- GPR[31]
(deafult):
PC_next <- PC + 4
RegAddr
Jump and link $ra: # link
RegAddrW <- 31
Write to rd: # RegW2rd
RegAddrW <- rd
(default) Write to rt:
RegAddrW <- rt
RegDataW
load memory to register: # Mem2Reg
RegDataW <- MemData
Jump and link $ra: # link
RegDataW <- PC + 4
(default):
RegDataW <= ALUresult
ALU data within
Use 16bit imm: # ALUuseImm
need signExt: #immSignExt
inB <- signExt(imm16)
(default) zeroExt:
inB <- zeroExt(imm16)
(default) Use GRF[RegAddr2]:
Controller
>| op | Regitser | ALU | Memory | PC | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RegW2rd | Mem2Reg | link | RegWrite | ALUuseImm | immSignExt | ALUctrl | saveHigh | MemWrite | Branch | jIndex | jr | |
| add | ✔ | ✔ | add | |||||||||
| sub | ✔ | ✔ | sub | |||||||||
| ori | ✔ | ✔ | or | |||||||||
| lw | ✔ | ✔ | ✔ | ✔ | add | |||||||
| sw | ✔ | ✔ | add | ✔ | ||||||||
| beq | sub | ✔ | ||||||||||
| lui | ✔ | ✔ | or | ✔ | ||||||||
| jal | ✔ | ✔ | nop | ✔ | ||||||||
| jr | nop | ✔ | ||||||||||
GRF
DataR1 <- GPR[AddrR1]
DataR2 <- GPR[AddrR2]
when posedge clk:
if reset:
GPR[0] <- 0x0000_0000
...
GPR[31] <- 0x0000_0000
else if WEn:
GPR[AddrW] <- DataW
$display
Inputs
| port | bit |
|---|---|
AddrR1 | [4:0] |
AddrR2 | [4:0] |
AddrW | [4:0] |
DataW | [31:0] |
WEn | 1 |
clk | 1 |
reset | 1 |
WPC | [31:0] |
Outputs
| port | bit |
|---|---|
DataR1 | [31:0] |
DataR2 | [31:0] |
ALU
if saveHigh
result <- (inA op inB) << 16
else
result <- inA op inB
zero <- result == 0
Inputs
| port | bit |
|---|---|
inA | [31:0] |
inB | [31:0] |
ALUctrl | [2:0] |
saveHigh | 1 |
Outputs
| port | bit |
|---|---|
zero | 1 |
result | [31:0] |
IFU
instruct <- instruct_memory[PC]
PC <- PC_next
Inputs
| port | bit |
|---|---|
PC_next | [31:0] |
clk | 1 |
reset | 1 |
Outputs
| port | bit |
|---|---|
instruct | [31:0] |
PC | [31:0] |
*IM
instruct <- ROM[PC]
Memory
ROM: 4096 x 32bit
Inputs
| port | bit |
|---|---|
PC | [31:0] |
Outputs
| port | bit |
|---|---|
instruct | [31:0] |
DM
MemData <- memory[Address]
when posedge clk:
if MemWrite:
memory[Address] <- Data
Inputs
| port | bit |
|---|---|
Address | [31:0] |
Data | [31:0] |
MemWrite | 1 |
clk | 1 |
reset | 1 |
WPC | [31:0] |
Outputs
| port | bit |
|---|---|
MemData | [31:0] |
Instruct Translator (Debug)
这个模块仅用于在debug的时候将16进制机器码翻译为汇编代码
输出格式为:at ins: 0x0cadfc00 0x00003000: add $1, $2, $3
if(op == `special) begin
if(func == `add)
$display("at ins: %h: @%h: add $%d, $%d, $%d", instruct, PC, rd, rs, rt);
else if(func == `sub)
$display("at ins: %h: @%h: sub $%d, $%d, $%d", instruct, PC, rd, rs, rt);
else if(func == `jr)
$display("at ins: %h: @%h: jr $%d", instruct, PC, rs);
end
else begin
if(op == `ori)
$display("at ins: %h: @%h: ori $%d, $%d, %h", instruct, PC, rt, rs, imm16_zeroExt);
else if (op == `lw)
$display("at ins: %h: @%h: lw $%d, %h($%d)", instruct, PC, rt, imm16_signExt, rs);
else if (op == `sw)
$display("at ins: %h: @%h: sw $%d, %h($%d)", instruct, PC, rt, imm16_signExt, rs);
else if (op == `beq)
$display("at ins: %h: @%h: beq $%d, $%d, %h -> %h", instruct, PC, rs, rt, imm16_signExt, PC + 4 + (imm16_signExt << 2));
else if (op == `lui)
$display("at ins: %h: @%h: lui $%d, %h", instruct, PC, rt, imm16_zeroExt);
else if (op == `jal)
$display("at ins: %h: @%h: jal %h -> %h", instruct, PC, index26, index32);
end
思考题
阅读下面给出的 DM 的输入示例中(示例 DM 容量为 4KB,即 32bit × 1024字),根据你的理解回答,这个 addr 信号又是从哪里来的?地址信号 addr 位数为什么是 [11:2] 而不是 [9:0] ?
A:因为DM一共有1024字,即10bit地址位,addr的范围为
0x00000000-0x00002FFF,实际使用的因为是按字寻址,因此addr必然是4的倍数,只需用到addr[11:2]这几位的数字,后两位是00思考上述两种控制器设计的译码方式,给出代码示例,并尝试对比各方式的优劣。
控制信号每种取值所对应的指令
assign RegWrite = (op == `special || op == `ori || op == `lw || op == `lui || op == `jal);优势:
简洁(易于实现和维护,添加指令的时候只需要加入对应控制信号的表即可)
可以清晰地了解每个指令需要的操作,这有助于提高代码的可读性
劣势:
- 加入新的指令的时候会修改所有的控制信号表
指令对应的控制信号如何取值
if (op == 6'b000000) begin if (func == 6'b100000) begin // add RegDst = 1'b1; ALUsrc = 1'b0; ALUop = 2'b00; PCsrc = 1'b0; ReadData = 1'b0; // x WriteData = 1'b0; // x MemToReg = 1'b1; ShfToReg = 1'b0; RegWrite = 1'b1; ExtRes = 1'b0; // x Jump = 2'b00; end else if (func == 6'b100010) begin // sub RegDst = 1'b1; ALUsrc = 1'b0; ALUop = 2'b01; PCsrc = 1'b0; ReadData = 1'b0; // x WriteData = 1'b0; // x MemToReg = 1'b1; ShfToReg = 1'b0; RegWrite = 1'b1; ExtRes = 1'b0; // x Jump = 2'b0; end end优势:
- 可以灵活修改指令的控制信号
劣势:
- 可能需要更多的逻辑,会增加设计的复杂性。
在相应的部件中,复位信号的设计都是同步复位,这与 P3 中的设计要求不同。请对比同步复位与异步复位这两种方式的 reset 信号与 clk 信号优先级的关系。
同步复位
clk优先级大于reset
异步复位
reset优先级大于clk
C 语言是一种弱类型程序设计语言。C 语言中不对计算结果溢出进行处理,这意味着 C 语言要求程序员必须很清楚计算结果是否会导致溢出。因此,如果仅仅支持 C 语言,MIPS 指令的所有计算指令均可以忽略溢出。 请说明为什么在忽略溢出的前提下,addi 与 addiu 是等价的,add 与 addu 是等价的。提示:阅读《MIPS32® Architecture For Programmers Volume II: The MIPS32® Instruction Set》中相关指令的 Operation 部分。
temp ← (GPR[rs]31||GPR[rs]31..0) + (GPR[rt]31||GPR[rt]31..0) if temp32 ≠ temp31 then SignalException(IntegerOverflow) else GPR[rd] ← temp endif在忽略溢出的情况下,这段代码可以直接改写为
temp ← (GPR[rs]31||GPR[rs]31..0) + (GPR[rt]31||GPR[rt]31..0) GPR[rd] ← temp又由于寄存器的位宽为32,因此33位的数据被舍弃,代码可以改为写
emp ← GPR[rs]31..0 + GPR[rt]31..0 GPR[rd] ← temp即
GPR[rd] ← GPR[rs]31..0 + GPR[rt]31..0和
addu是等价的同理
addi因为不需要判断溢出,所以和addiu是等价的